人工感知技术在模仿人类视觉和触觉方面取得了备受瞩目的进展,但仅限于具有光照和可触摸条件。一些动物如板鳃类鱼通过“第六感”感知电场,从而能够在低能见度条件下导航和捕猎。这启发了电感应器件的开发以应对无形感知缺口。近期,新加坡南洋理工大学研究人员与合作者开发了一种有机电感知晶体管并建立了器件感知动力学模型。该器件能够灵敏并稳定地感知双极静电场,助力开发无形感知系统,推动电感知技术在机器人导航、监控和搜救等领域的应用。该工作发表在Science Advances上。
核心创新点
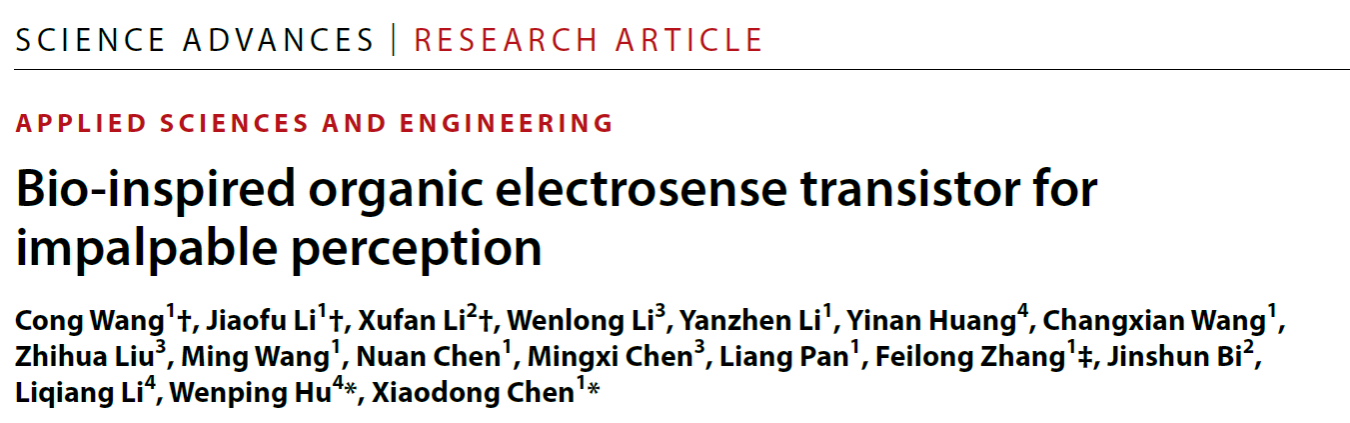
电荷泵层助力电荷诱导:
该电感知晶体管(EST)模仿电感受细胞,采用有机半导体单晶膜作为空间电场门控载流子沟道,电荷泵层通过介电层与其隔离。通过引入的电荷泵层,增强了沟道中的感应电荷,提升了EST的信噪比至60 dB。
图一:电荷泵效应增强器件的电荷感应
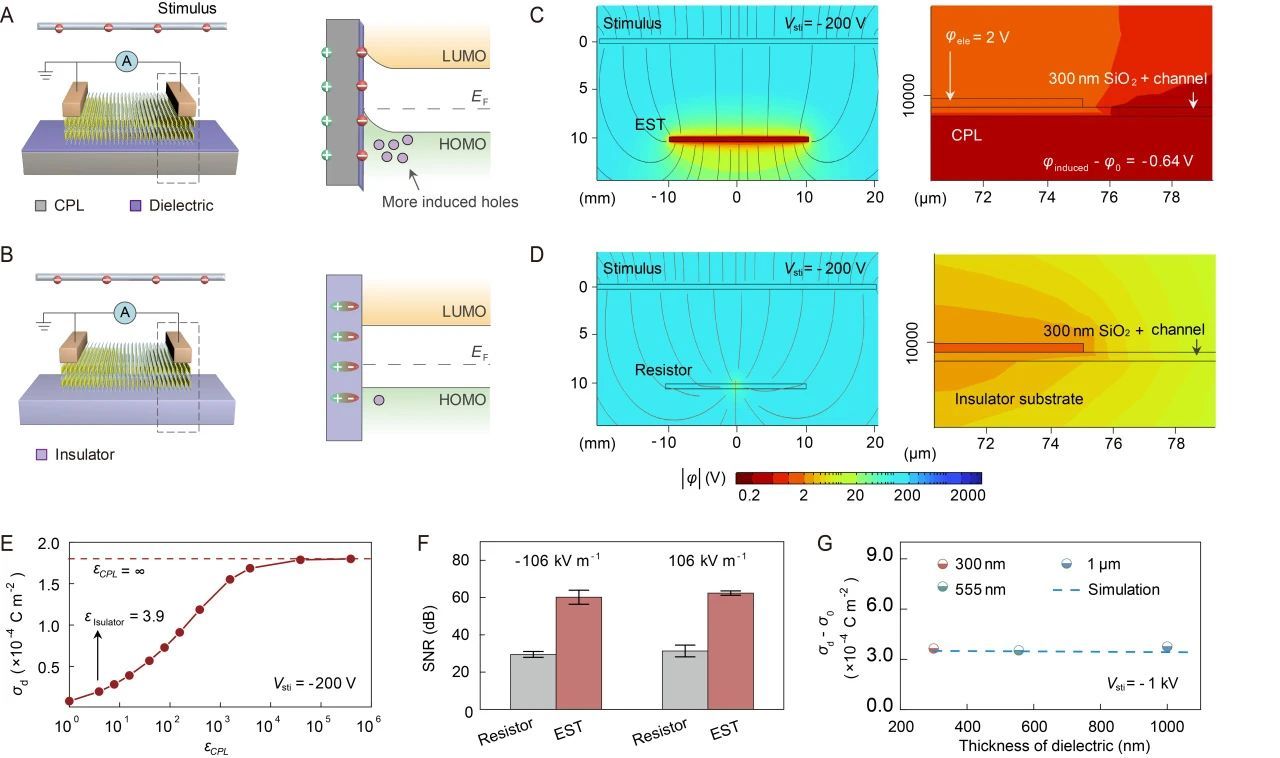
时间依赖响应的可编程性:
调整半导体通道的结晶性,实现了器件可编程的时间依赖响应。高结晶性薄膜减少载流子陷阱态,使EST产生更稳定的信号输出。通过TCAD模拟与实验结合,建立了感应电荷传输的动力学模型,为优化性能提供理论支持。
图二:可编程的时间依赖响应
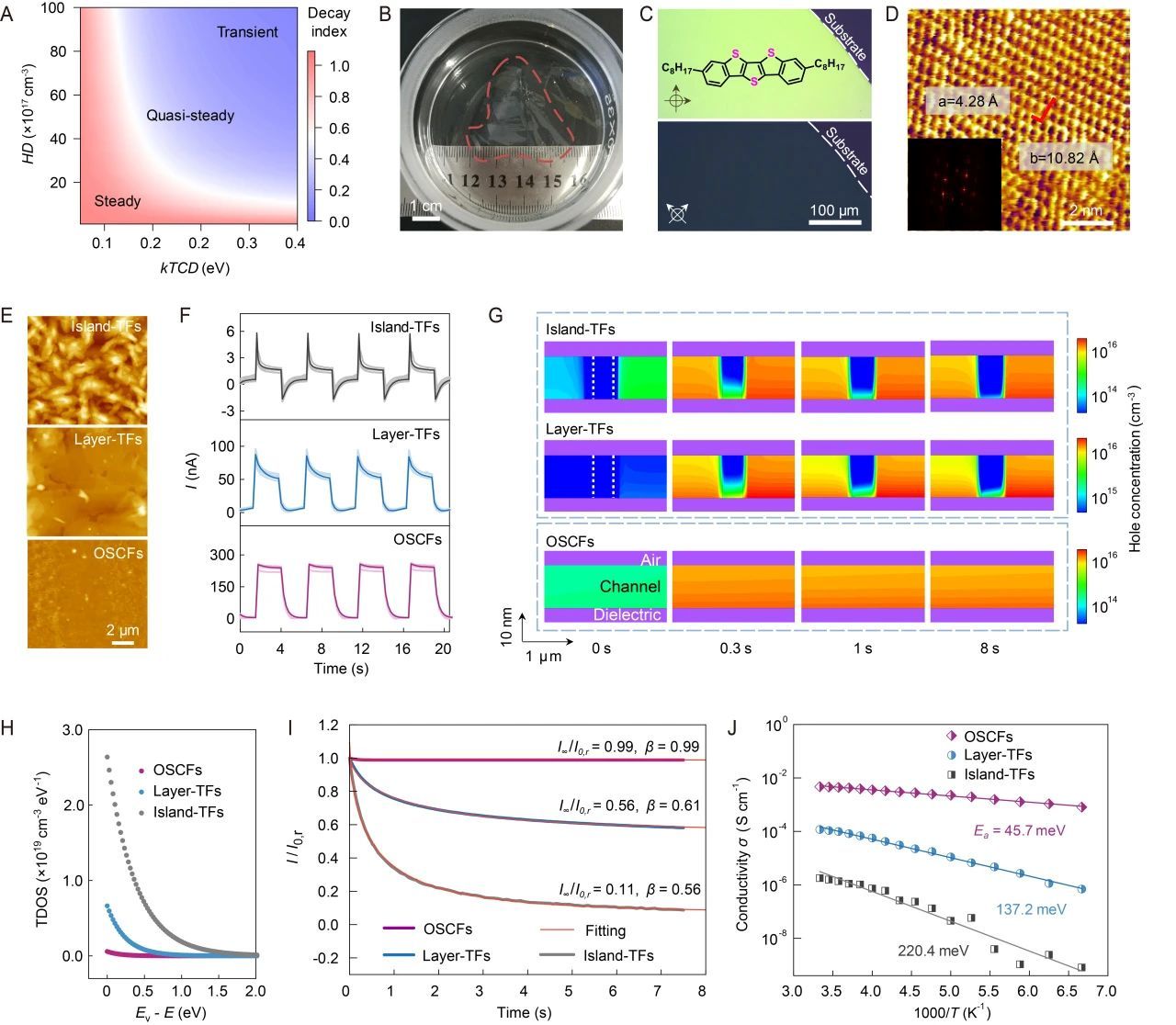
高灵敏电场无形感知:
EST可检测正负双极性电场,负电场检测限为-0.12 kV/m,正电场检测限为0.61 kV/m,支持区分不同电场极性并识别带电物体的运动方向(靠近或远离),可以识别极慢速运动的带电物体(低至20 μm/s)。
图三:EST的电感应能力
人工电感知系统用于导航和隐蔽物探测:
将EST集成到爬行机器人头部,使其具有电感知能力,能够根据电场信号探测隐藏物体和自主导航。EST具有优良的电磁干扰抵抗能力和能效表现,适用于复杂、恶劣或危险环境,为扩展人工系统的感知能力开辟了新途径。
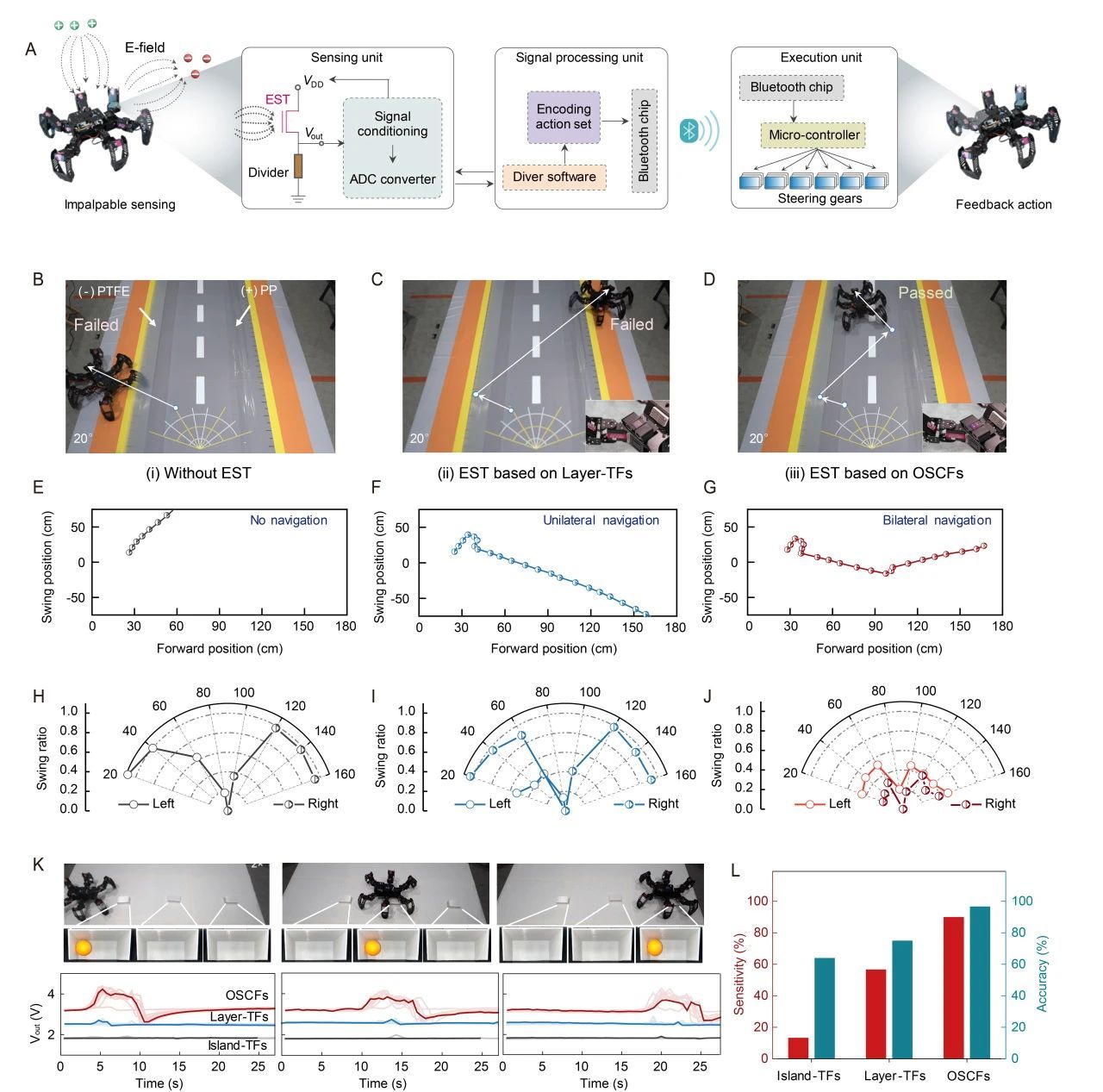
图四:人工感知系统自主导航和隐蔽物探测演示
来源:柔性电子地平线公众号
DOI:10.1126/sciadv.ads7457